






Elektronski snemalnik WLB-10KN uporablja servo nadzorni sistem, lahko doseže enakomerno obremenitev s premikom in enakomerno obremenitev s silo v dveh načinih obremenitve, visoko učinkovitost in dobro stabilnost.
1. Glavna uporaba in obseg uporabe
Elektronski snemalnik WLB-10KN uporablja servo nadzorni sistem, lahko realizira enakomerno obremenitev s premikom in enakomerno obremenitev s silo v dveh načinih obremenitve, visoko učinkovitost in dobro stabilnost. S funkcijo dvojnega senzorja je obseg meritev širši, natančnost višja, uporaba pa bolj prilagodljiva in priročna. Upravljanje z zaslonom na dotik, vmesnik za upravljanje človek-stroj je prijazen. Naprava za risanje je opremljena s funkcijo omejitve hoda in zaščite pred preobremenitvijo pozitivne in negativne vrednosti sile, ki lahko prepreči poškodbe opreme zaradi napačnega delovanja.
Primeren je za preizkus natezne in vezne trdnosti suhe mešanice malte, izolacijskega materiala, lepila za keramične stene in talne ploščice, laminirane gradbene barve in kita, ki se uporablja za gradnjo zunanjih sten. Ustreza testu trdnosti lepljenja različnih gradbenih materialov, ki ga določajo JC/T547-2005, GB/T9779-2005, JG/T157-2004.
Glavne značilnosti:
1) Upravljanje z zaslonom na dotik, uporabniku prijazen vmesnik.
2) Servo pogon, stalna enakomerna obremenitev s premikom in enakomerna obremenitev s silo.
3) S funkcijo dvojnega senzorja je standardna konfiguracija en senzor.
4) Funkcija hitrega dviganja in samodejnega vračanja z enim ključem, ko ni bremena.
5) Funkcija zaščite pred preobremenitvijo omejitve hoda ter pozitivne in negativne vrednosti sile.
6) Hitro pozicioniranje v smeri X-Y, posebej primerno za zaznavanje več vzorcev na testni plošči.
7) Opremljen z enotočkovno objemko, priročno za testiranje enega vzorca.
8) Skupna glava T-kartice za lažje pozicioniranje in nalaganje vzorcev.
9) Premična stiskalnica za preprečevanje upogibanja in deformacije testnega materiala. (nestandardno)
2. Glavni tehnični indikatorji
1) Največja eksperimentalna sila: 10000 N
2) Ločljivost obremenitve: 0,1N
3) Učinkovito območje zaznavanja: 1 %-100 % največje eksperimentalne sile
4) Natančnost merjenja obremenitve: znotraj ±0,5 % navedene vrednosti
5) Metoda risanja: nadzor vrednosti sile, nadzor premika in druge metode nadzora
6) Razpon hitrosti vlečenja: 0,1 mm-300 mm /min
7) Razpon širine vzorca: 70-500 mm
8) Največja debelina vzorca: 50 mm
9) Največji hod preskusne glave: 100 mm
3. Pogoji delovnega okolja
3.1 V razponu sobne temperature 100C ~ 350C relativna vlažnost ne presega 80 %;
3.2 Namestite ga pravilno na trden temelj ali delovno mizo z ravnino 0,2/1000;
3.3 V okolju brez vibracij, korozivnih medijev in motenj močnega elektromagnetnega polja;
3.4 Razpon nihanja napajalne napetosti ne sme presegati ±10 % nazivne napetosti.
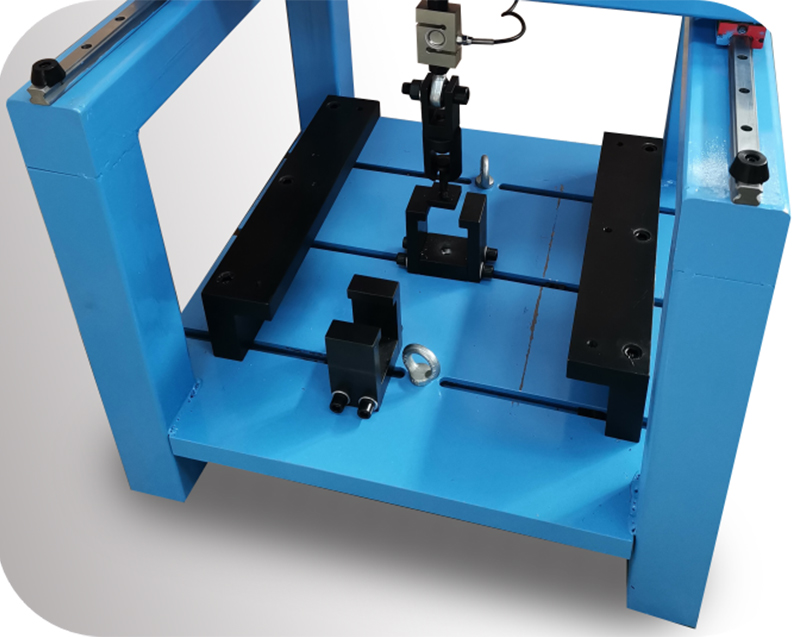
4. Glavna struktura
4.1 Povezovanje napajalnikov
Kot je prikazano na sliki, vstavite naključni napajalnik v napajalna vrata, vklopite sprednji gumb za vklop in kabel senzorja priključite pred dostavo.

4.2 Prilagoditev poskusnega položaja
Kot je prikazano na zgornji sliki, lahko glede na število preskusnih blokov namestite enotočkovno natezno vpenjalo (naključno z 10 kosi), popravite položaj vpenjala in nato ročno prilagodite položaj vlečne glave , testna, natezna vpenjalna glava je sferična univerzalna, lahko se samodejno poravna, primerna za različne položaje namestitve.
Na desnem koncu naprave je gumb [stikalo za vklop] za vklop ali izklop naprave in pokrivna plošča zunanjega napajanja rdeča [stikalo za izklop v sili], zelena [indikator napajanja].
Ko je gostitelj izklopljen, zavrtite gumb [stikalo za vklop], sistem je vklopljen in zelena lučka [indikator napajanja] sveti. Naprava lahko deluje.
V nujnih primerih pritisnite rdeče [stikalo za zaustavitev v sili], da prekinete napajanje gostitelja.
5. Namestitev in prilagoditev
5.1 Vzemite opremo iz embalaže in preverite, ali je med transportom prišlo do trkov ali poškodb.
5.2 Postavite opremo na trdno ploščad ali cementno ploščad in nastavite nivo tako, da je v vodoravnem položaju (ravnina 0,2/1000);
5.3 Napajalni sistem mora biti 220VAC±10%/50Hz in mora imeti zanesljive ozemljitvene ukrepe.
6. Uporaba in delovanje
6.1 Priprave:
6.1.1 Pravilno povežite vse kable naprave in jo nato vklopite.
6.1.2 Predgretje 5 min;
6.1.3 Počistite okno za prikaz preskusne sile na nič.
6.2 Pri vzorcih z drugačnimi specifikacijami zamenjajte drugačna vpenjala.
6.3 Uvod in opis vsakega gumba za upravljanje sta prikazana na zaslonu naprave
Diagram vmesnika delovanja (kot sledi):

6.3.1 Funkcije tipke za obraz:
Zaslon s tekočimi kristali: prikaže vrednost sile, vrh, premik, hitrost, poziv, preskusno krivuljo itd.
Zaslon LCD je zaslon na dotik in vse funkcije testa je mogoče dokončati s klikom na besedilo ali sliko na zaslonu LCD.
6.3.2 Podrobnosti:
Naslednje podrobnosti o prikazu in funkciji vsakega zaslona, prepletene z uporabo gumbov.

To je zaslon, ki se vnese neposredno po zagonu, kliknite na zaslon ali kliknite katero koli tipko. Prikaže se naslednji zaslon, kot je prikazano na sliki 2:

Na sliki 2 je * pred "nateznim preskusom", kar pomeni, da je trenutno izbrana preskusna metoda natezni preskus.
Klik na katero koli vrstico na zaslonu pomeni, da je izbrana ustrezna preskusna metoda. Za izbiro preskusne metode lahko uporabite tudi tipko
Tukaj se predpostavlja, da je izbran "natezni preskus", kliknite V redu na zaslonu ali pritisnite tipko

Na sliki, prikazani na sliki 3, kliknite »Test« ali pritisnite tipko

Na sliki 4 kliknite »pospeši« in »pospeši«, da spremenite hitrost, hitrost pa lahko spremenite tudi z gumboma
Vrnite se na sliko 3, kliknite Nastavitve v zgornjem levem kotu zaslona ali pritisnite

Na sliki 5 kliknite »Izbira preskusne metode«, da preklopite na zaslon, kot je prikazano na sliki 2.
Vrnite se na sliko 5, kliknite »Sistemska kalibracija«, poziv za vnos gesla, kot je prikazano na sliki 6:

Vnesite geslo 111 in kliknite V redu za vstop v sliko 7:
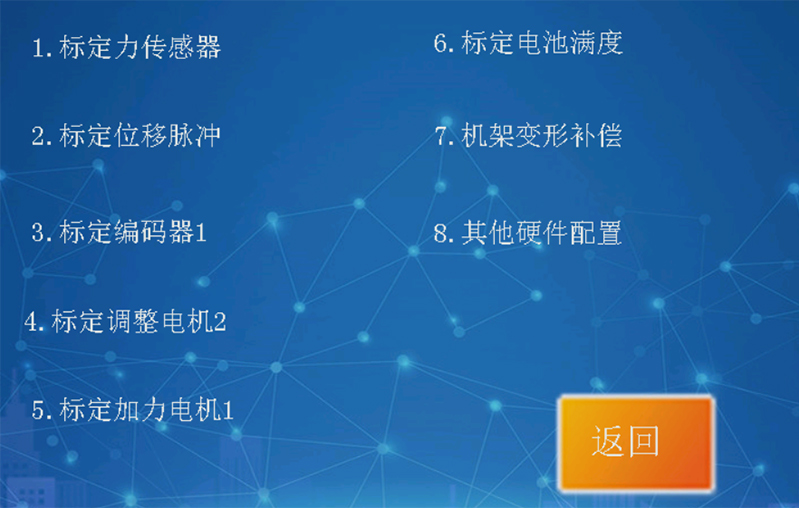
Tri parametre: silo, premik, hitrost je treba umeriti pred uporabo, sicer so netočni.
Med temi tremi parametri mora biti zaporedje umerjanja najprej premik, nato hitrost in nazadnje sila.
Dva pojma: premik in deformacija.
Premik je, kako daleč se premakne preskusni žarek.
Deformacija je deformacija vzorca po obremenitvi, deformacijo pa lahko merimo s posebnim ekstenzometrom ali s premikom. Če za primer vzamemo stisnjeno trdo peno, se med premikanjem zgornjega vdolbina navzdol premik še naprej povečuje in deformacija je pred stikom z vzorcem enaka nič; po stiku z vzorcem se deformacija poveča in poveča se tudi premik, skupni premik minus prazen hod pred stikom z vzorcem pa je deformacija. To je osnovni princip merjenja deformacije s premikom.
Glavna nadzorna plošča podpira tri impulzne vhodne kanale, in sicer impulz 0, impulz 1, impulz 2.
Impulz 0 je povezan z izhodnim impulzom motorja na tiskanem vezju, za koračni motor ali AC servo motor je impulz pogona motorja, impulz 0 šteje, impulz 0 odraža število korakov vrtenja motorja, vrtenje motorja poganja žarek, da se premika, impulz 0 je sorazmeren s premikom.
Pulse 1 in Pulse 2 sta popolna ortogonalna vmesnika kodirnika z zunanjimi vhodi pinov.
Kliknite "Calibration displacement pulse" za prikaz slike 8:

Za merjenje premika je potrebno ravnilo ali kazalnik s številčnico.
Vnesite poljubno hitrost (ko hitrost ni natančna in nepotrebna), motor se dvigne ali spusti, da zažene motor, vzemite ravnilo kot standard, pustite, da se žarek premakne za določeno razdaljo, na primer 20 mm, oglejte si izmerjeno število impulza, ob predpostavki 2400, nato se standardna dolžina vnese v 20, ustrezno število utripa se vnese v 2400, kliknite shrani, premik kalibracija je končana.
Umerjanje kodirnika 1 in kodirnika 2 je podobno in ne bo ponovno opisano.
Kliknite "Hitrost umerjanja" na sliki 7 za prikaz, kot je prikazano na sliki 9:
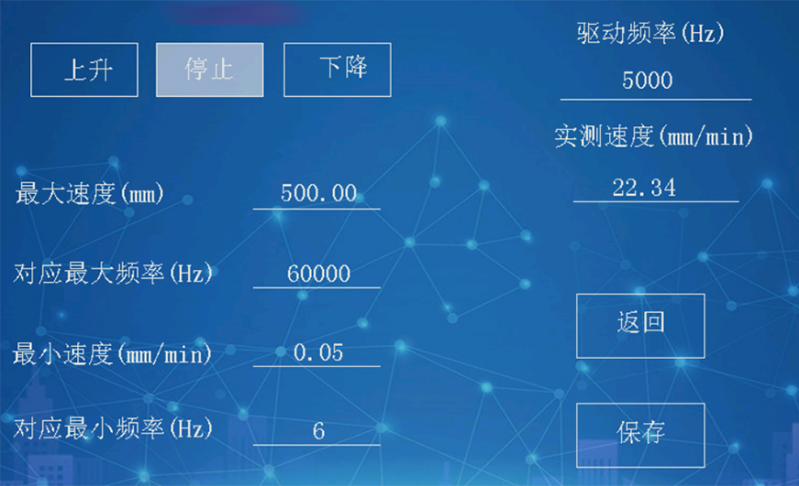
Na sliki 9 vnesite poljubno frekvenco pogona, na primer 10000, kliknite gor ali dol in tri sekunde pozneje preverite izmerjeno hitrost. Če je izmerjena hitrost manjša od največje hitrosti, ki jo zahteva naprava, spremenite frekvenco pogona in poskusite znova, dokler izmerjena hitrost ne bo večja od največje hitrosti, ki jo zahteva naprava. Predpostavimo, da je izmerjena hitrost 504, ko je pogonska frekvenca 64000.
Nato se ustavite, vnesite štiri številke na levi, največja hitrost je 504, kar ustreza največji frekvenci je 64.000, najmanjša hitrost je 0,05 (0,05 je 504 deljeno z 10000), ustrezna najmanjša frekvenca je 6 ( 6 je 64.000 deljeno z 10.000). Razmerje hitrosti je izračunano na 1:10.000.
Kliknite »Calibrating force sensor« na sliki 7, ki se prikaže, kot je prikazano na sliki 10:

Na sliki 10 pripravite standardni dinamometer, najprej vnesite silo za vsako točko glede na merilno območje senzorja sile, ob predpostavki, da je merilno območje senzorja 500 N, nato pa so lahko točke sile 10, 20, 50, 100, 200, 500 , mora zagotoviti, da so sile razporejene v naraščajoči moči, šesta sila pa je merilno območje senzorja. Ko senzor ni obremenjen, kliknite
Na sliki 7 kliknite »Umeri druge senzorje sile« za prikaz, kot je prikazano na sliki 11:

Stroj lahko podpira še 3 senzorje sile v zamenljivi obliki, metoda kalibracije pa je podobna prvemu senzorju sile, zato ne bo ponovno opisana.
Kliknite »Pomoč« na sliki 5 in prikazal se bo zaslon s pomočjo, v glavnem definicija vsake povezave.
Izberite testno metodo na sliki 2 in kliknite »Nastavi«, da odprete stran za nastavitev parametrov testne metode.
Ti parametri se imenujejo nastavitveni parametri, parametri, opisani v prejšnji kalibraciji, pa se imenujejo kalibracijski parametri.
Parametri umerjanja so tovarniško nastavljeni za določitev točnosti instrumenta, uporabnik pa jih ne more poljubno spreminjati, zato so zaščiteni z geslom. Nastavitvene parametre lahko uporabnik spremeni glede na uporabo. Ti parametri ne vplivajo na natančnost naprave. Geslo ni potrebno.
V nadaljevanju je za primer natezni preskus. Nastavitveni parametri nateznega preskusa so prikazani na slikah 12 do 19

Slika 12
Slika 13
Slika 14
Slika 15
Slika 16
Slika 17
Slika 18
Slika 19
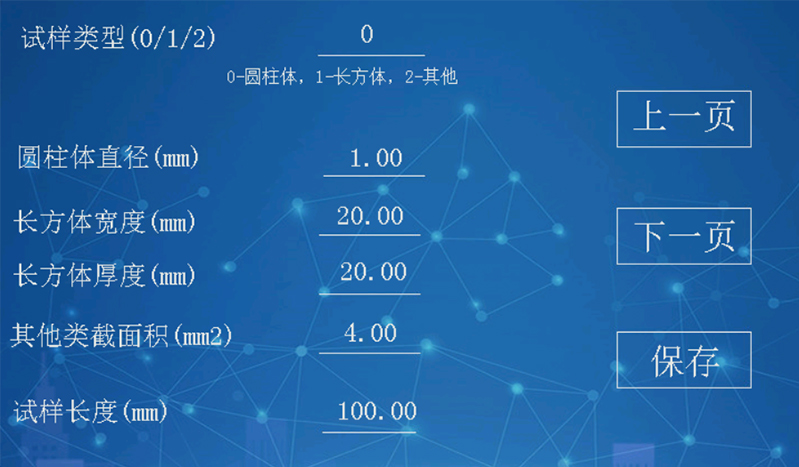
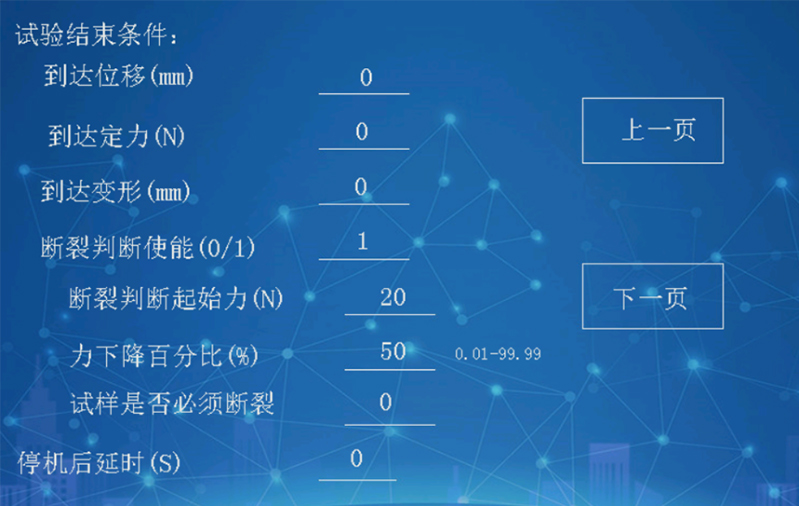
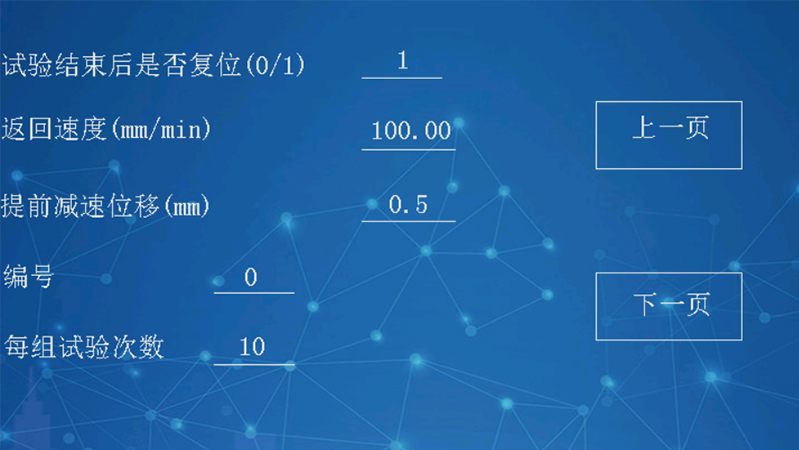
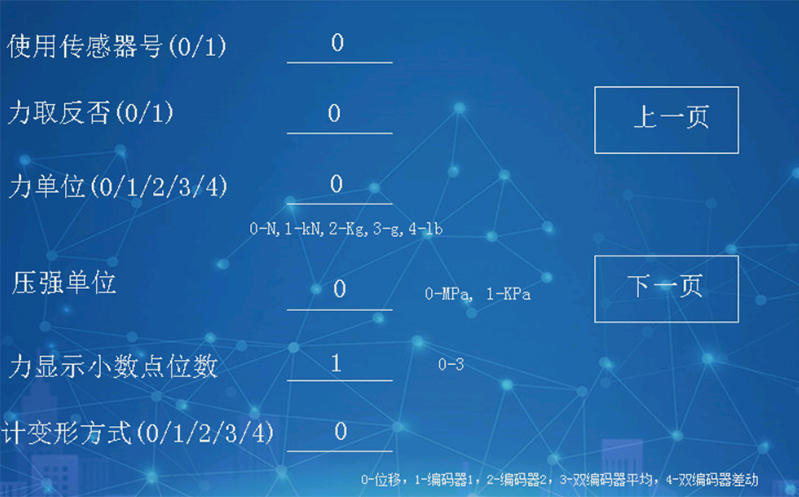
Od slike 12 do slike 19 so nastavljeni parametri, ki so opisani takole:
Vrsta vzorca je razdeljena na tri vrste. Če je vrsta vzorca 0, je parameter premera veljaven in sistem bo samodejno izračunal površino prečnega prereza glede na premer
Če je vrsta vzorca 1, sta parametra širine in debeline veljavna in sistem bo samodejno izračunal površino prečnega prereza glede na širino in debelino.
Če je vrsta vzorca 2, je veljavna površina preseka drugih vrst.
Sila, deljena s površino prečnega prereza, je enaka moči. Površina prečnega prereza je pravilna in trdnost je pravilna.
Dolžina vzorca se uporablja za izračun raztezka.
Spodnja in visoka točka elastičnega segmenta se uporabita za izračun elastičnega modula (glejte GB/T228-2010). Dve vredni določeni velikosti sta povezani z vzorcem. Na splošno je treba najnižjo točko nastaviti na približno 15 % največje sile, najvišjo točko pa na približno 30 % največje sile, zato je treba vrednost največje sile oceniti pred preskusom. Ti dve točki nastavite glede na ocenjeno največjo silo. (Računalniška programska oprema lahko posname celoten postopek testiranja, ni potrebe po oceni)
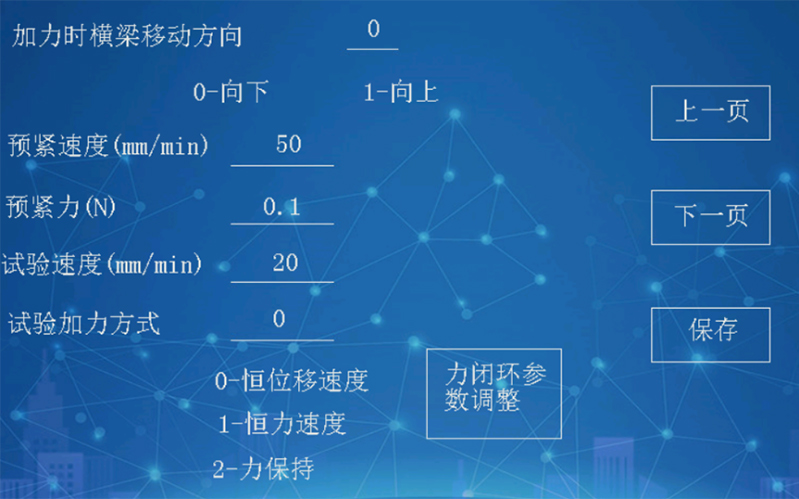
Smer gibanja naknadne sile 0- navzdol, 1- navzgor
Začetna hitrost premika, če je metoda uporabe sile konstantna hitrost premika, potem je tukaj preskusna hitrost.
Če je sila prednapenjanja nastavljena na 50 N, to pomeni, da vzorec postane raven, ko je sila 50 N, začetna točka za izračun deformacije pa je privzeto 0,1 N
Način sile: Konstantna hitrost premikanja, koračni motor in AC servo motor lahko zagotovita privzeti način sile.
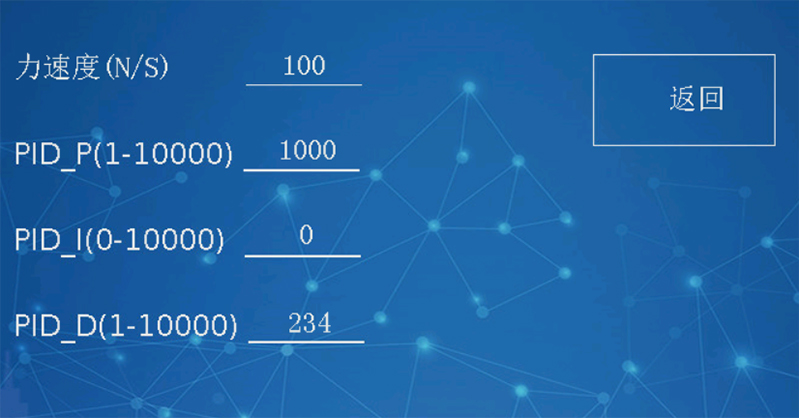
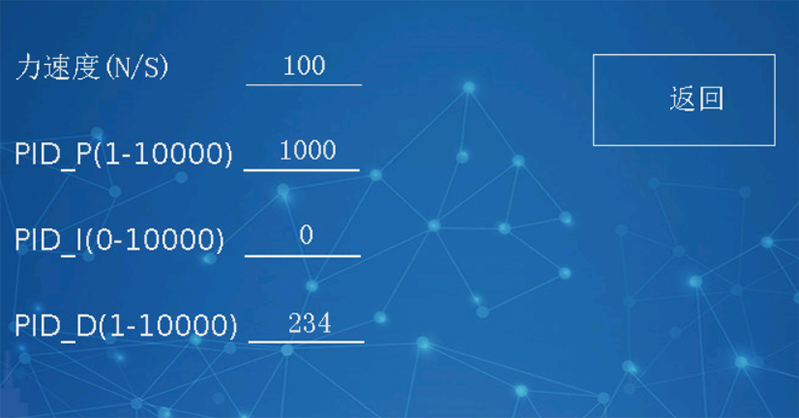
Konstantna hitrost sile, ta način zahteva uporabo povratne zanke sile, znane tudi kot algoritem zaprte zanke sile, obstajajo številni algoritmi zaprte zanke sile, tukaj je uporaba algoritma PID, treba je nastaviti parametre PID vnaprej. Postopek nastavitve ustreznih parametrov PID se imenuje nastavitev parametrov PID.
Kliknite [Prisilno prilagajanje parametrov zaprte zanke] na sliki 14, da se prikaže slika 20
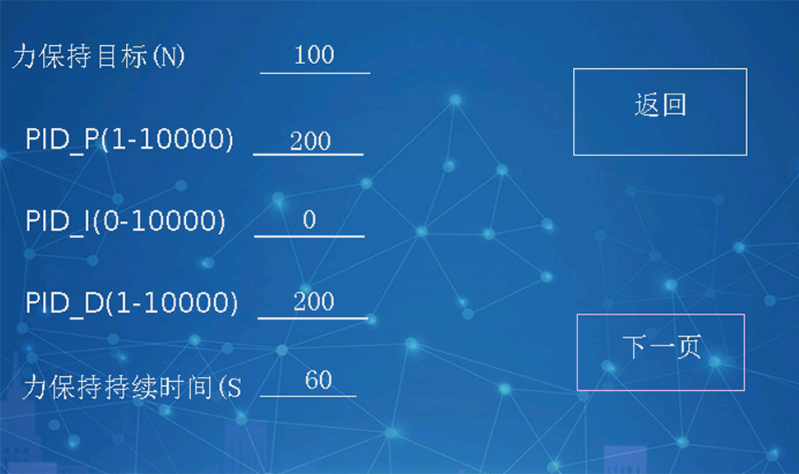
Vzdrževanje s konstantno silo uporablja tudi algoritem PID, kot je prikazano na sliki 21
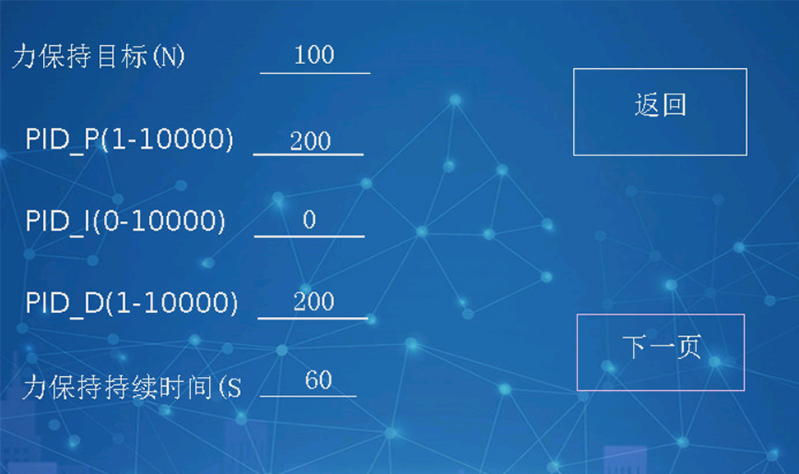
Opomba: Pri nateznem preskusu metoda zadrževanja konstantne sile ne deluje, samo pri preskusu zadrževanja sile.
7. Varnostni ukrepi
7.1 Pred prvim zagonom sistema preverite točnost kablov in vhodnega napajanja. Napajanje je 220V±50Hz in pravilno ozemljeno.
7.2 Pred preskusom pravilno nastavite testne parametre, da zagotovite točnost testnih podatkov.
7.3 Med preizkusom opravite test po pravilni metodi.
8. Pogoste napake in odpravljanje težav
| Zato je videz blokiran | Vzrok in zdravljenje |
| Po vklopu naprave se zaslon ne prikaže | Napajalni kabel krmilnika, varnost, stikalo itd. |
| Ne začni nič | Napajanje gostitelja, varnost, stikalo, krmilni kabel |
| Po obremenitvi testna sila ni prikazana | Senzor je pravilno priključen |
| Stabilnost sile | Preverite ozemljitvene kable sistema |
| Dolg zvočni alarm | Senzor je preobremenjen ali je vod senzorja pretrgan |




























